






















PROTO DESIGN 2012-2014
COLLAPSE COLLIDE
Studio Theodore Spyropoulos
Tutors Shajay Booshan, Mostafa El-Sayed, Manuel Jimenez
Team Saman Dadgostar, Felipe Sepulveda Rojas, Sofia-Miranta Papageorgiou, Akber A. Khan
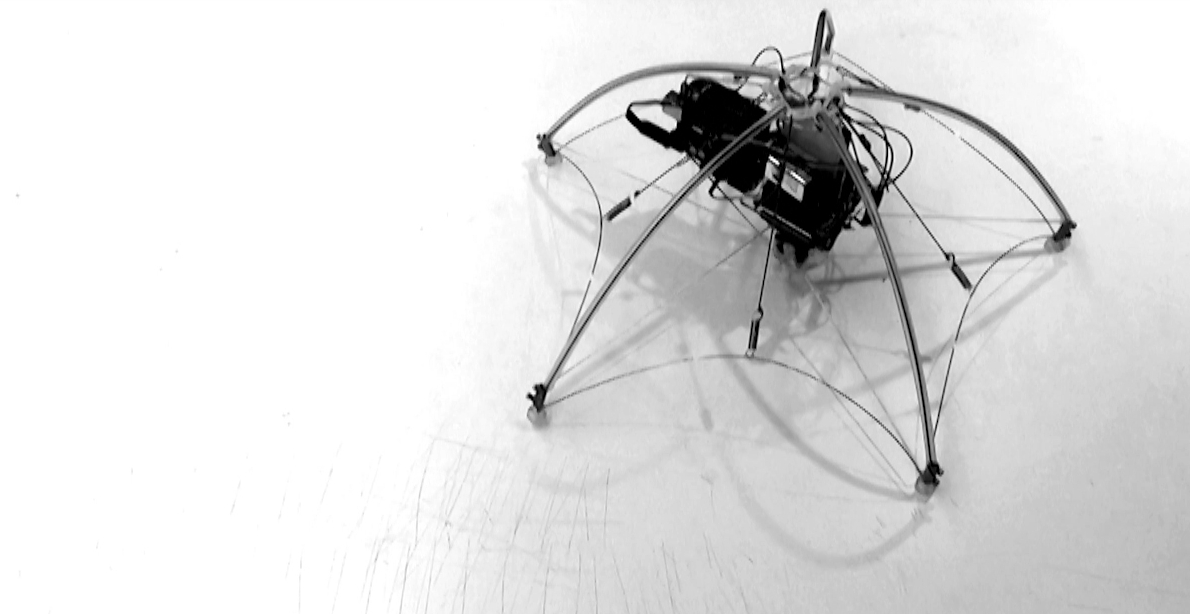
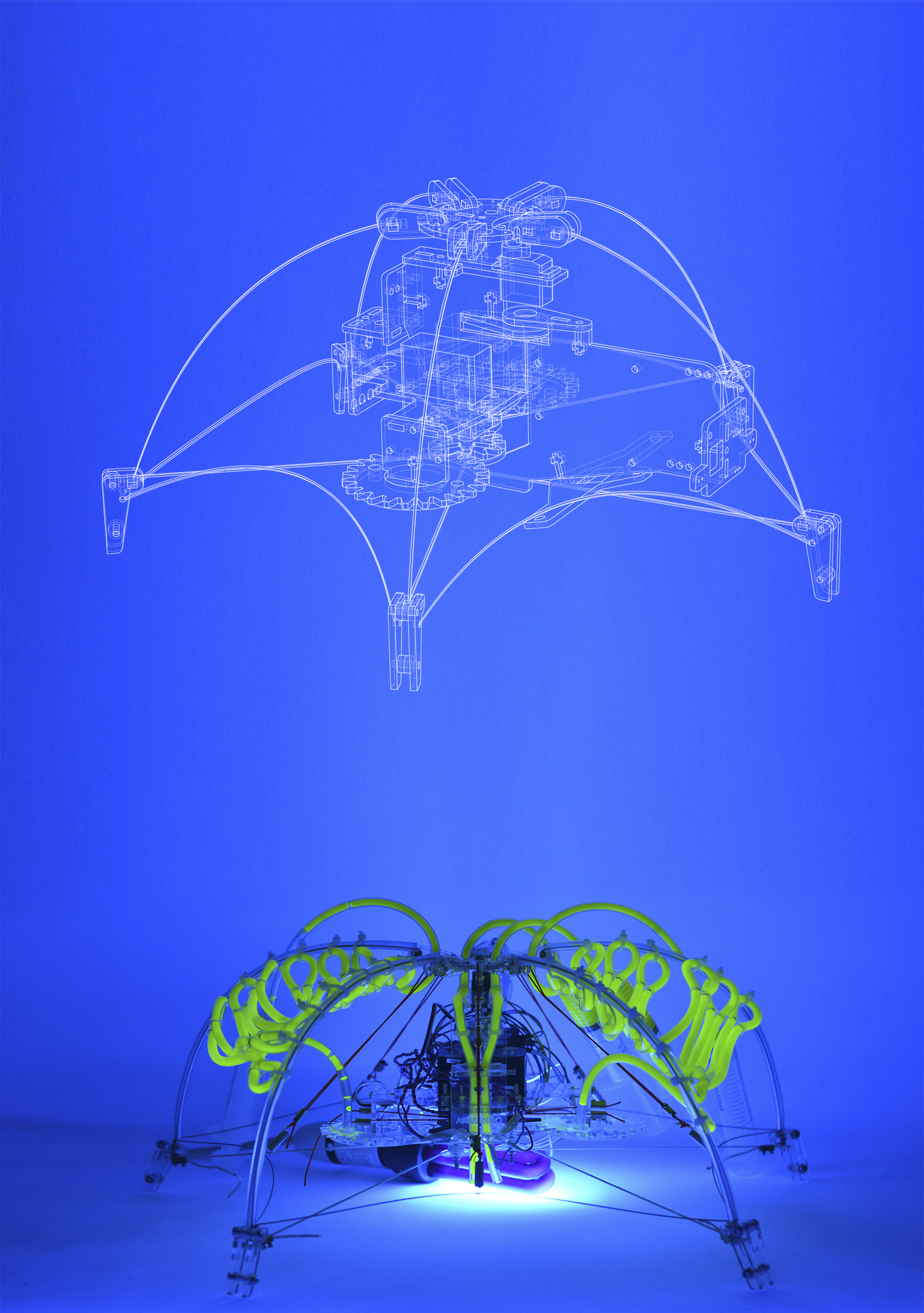
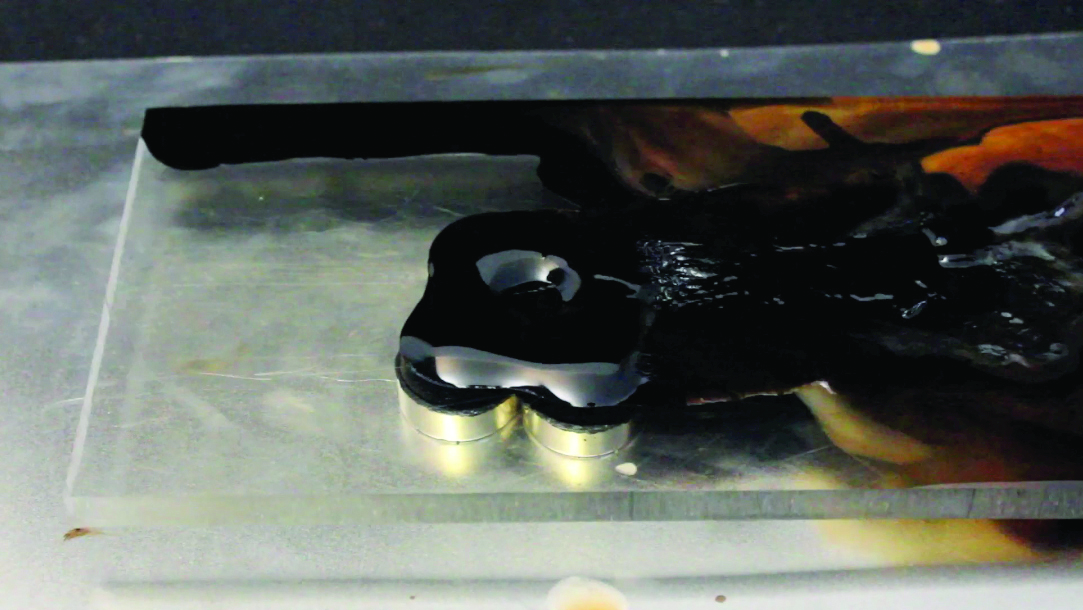
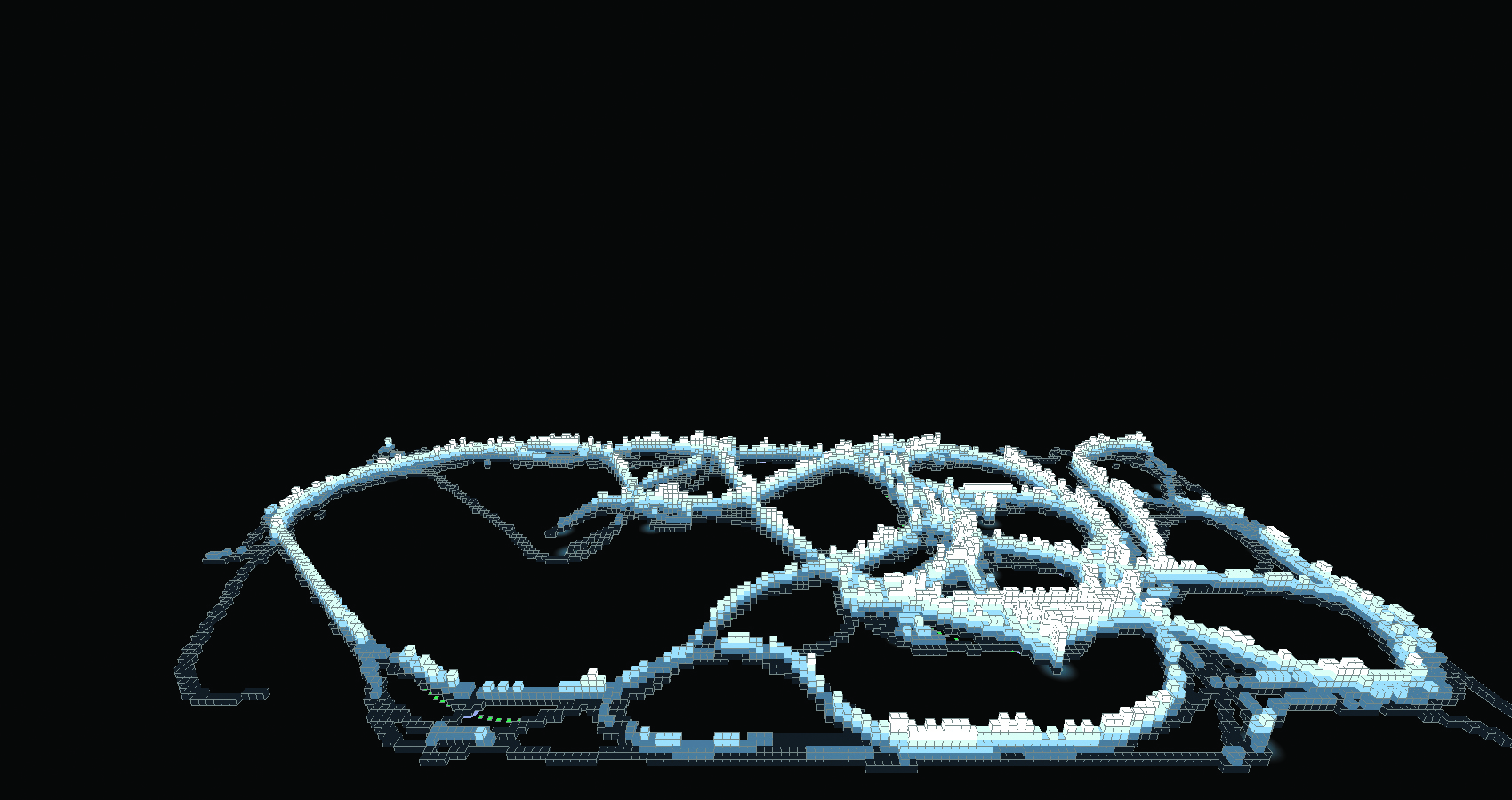
The project is an proto-typical autonomous system employing the use of swarm robotics, which forms the crux of our proposal as it is tested in loose fill environments as an agent of structure and space. Conceived as social insects based upon the rules of stigmergic social hierarchies, our robots organise themselves as an artificial social ecosystem that can be likened most to that of termite ecologies. The deployment of the system begins with an assessment of environmental conditions and parameters, which are then uploaded into the memory banks of the robots and deployed as clustered packs in target zones via air drop. Final structural and spatial formations are emergent results of stigmergic behaviour resulting from the interaction robots within the environment. Deformations occur as a result of robotic negotiations with the environment’s material and specific clustering logics utilised in order to best achieve their organisational and tectonic objectives. Aggregation and excavation logics that begin to facilitate the optimised manipulation of loose fill material have been studied through digital simulations and material tests. The prototypical aspect of the project is embodied by the system’s ability to be deployed in a variety of loose-fill environments and land topologies, this is justified by the versatility of the stigmergic system developed to organise behavioural outputs of the robot swarm.